
A year ago, I was an excited prefrosh savoring the sweet scent of orange blossoms as I explored Caltech’s campus with my family. We’d come during finals week, so most classrooms were empty and hallways were quiet. However, outside, we ran across a professor and group of students testing small boats. The boats floated on plastic bottles, with Styrofoam cups and a rainbow of wires heaped on top. We watched them whiz around on the water for a bit. The demonstration made me think that Caltech’s coursework couldn’t be “too theoretical” after all. In a few days, I was back home, and a month later, I decided to make Caltech my future home. Then, this past term, I took that class.
But it wasn’t all sunshine and rainbows. EE/ME 7, or Introduction to Mechatronics, is notorious for being a time sink. Upperclassmen warn frosh to avoid it. The TQFRs, or Teaching Quality Feedback Reports, say past students spent an average of nine hours on homework a week, twice the expectation for a class with its unit rating.
I worried about this when deciding whether to take the course. However, after reading this line from the course description, I was sold: “Topics covered include motors, piezoelectric devices, light sensors, ultrasonic transducers, and navigational sensors such as accelerometers and gyroscopes.” In high school, I did robotics (FTC, if you’re familiar with the FIRST robotics program). We used these devices—light sensors, ultrasonic sensors, and gyroscopes—to make the robot perform tasks like following a line. However, I never had a clue how the sensors worked. They were mysterious black boxes that enabled the robot to do really cool things. The offer to be taught their magic was tantalizing.
Mechatronics, as I learned on the first day of class, lies in the intersection between electrical engineering, mechanical engineering, and computer science—hence the cross-listing in EE and MechE. It’s a lab course, and we had two of them each week, including
-
Putting together a little motor.
- Lighting up an LED through a relay, which is a type of switch. It’s the green-tinted box with a coil of copper wire inside.

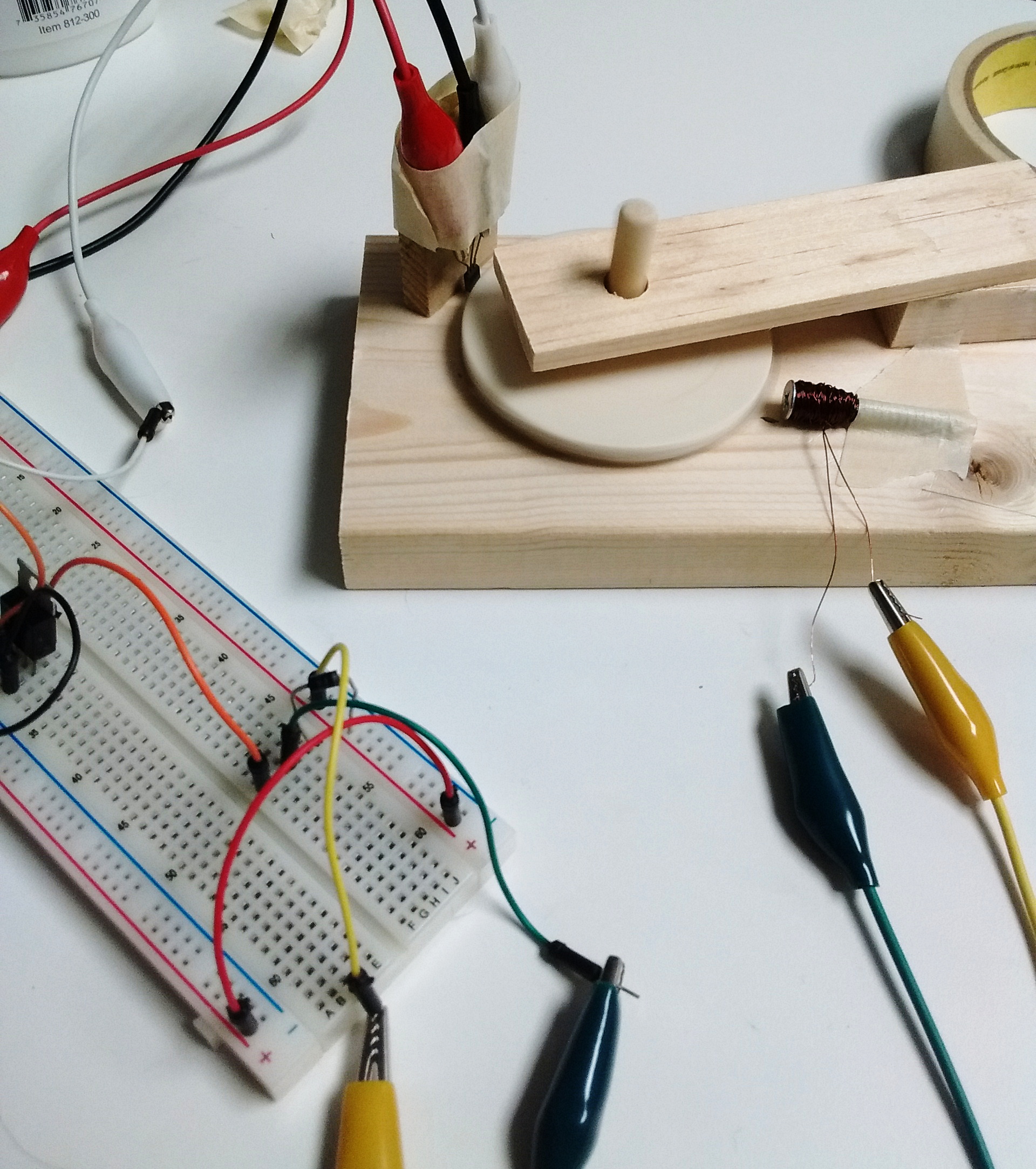
- Building a brushless motor controlled by a magnetic sensor.
- Designing and assembling a toy car with the proper gear ratio and PWM* circuit to make it move at a desired speed. Sorry, apparently I was lazy for this lab and didn’t take a photo 🙁
- Wiring a circuit to use PWM to control the position of a servo motor based on detected light.
- Our final was to build a boat that would follow an ultrasonic beacon using two fans at the back of the boat. After working all morning on our boats, the class walked over to a little pool and replicated the scene I’d witnessed as a prefrosh, the perfect bookend to a great class.

P.S. For any interested prefrosh—who aren’t technically freshmen until the cannon fires—Introduction to Mechatronics (EE/ME 7) is being offered this upcoming fall!
- PWM = Pulse Width Modulation. To control the speed of a motor, it’s relatively hard to directly scale the power sent to it. It’s easier to just use two levels of power—none and full—and switch between them so fast that nobody can tell that you’re using black and white, not gray. The relative durations of these two alternating states determines the speed.

